•The cross product takes two 3D vectors and produces a third vector that is perpendicular to both. Its direction follows the right-hand rule: curl your fingers from the first vector to the second, and your thumb points in the cross product’s direction. Its length equals the area of the parallelogram formed by the two input vectors. If the two vectors are parallel, the cross product is the zero vector.
•You compute the cross product with a specific component formula that looks messy at first. Each component is built from 2x2 determinants, which are small area-measuring expressions. This ties the computation to geometry: determinants measure area and orientation. A consistent pattern of minors helps memorize and understand the formula.
•The magnitude of the cross product is ||v||·||w||·sin(theta), where theta is the angle between the vectors. This means the cross product gets bigger as the vectors become more perpendicular. When the vectors align (angle 0° or 180°), sin(theta) is 0 and the cross product vanishes. When they are perpendicular (90°), sin(theta)=1 and the magnitude is maximal.
•The right-hand rule sets the sign and direction for the cross product. Flipping the order of vectors flips the result: v×w = −(w×v). This connects with orientation, a consistent way to choose which direction is “positive” in 3D. The sign matters in physics and geometry.
•Determinants of 2x2 matrices measure signed area in 2D, and of 3x3 matrices measure signed volume in 3D. Using determinants explains the cross product formula and its geometric meaning. The cross product’s components are minors of a 3x3 pattern. This determinant viewpoint also explains why direction and magnitude come out right.
•A key identity is that for any vector P, (v×w)·P equals the signed volume of the parallelepiped formed by v, w, and P. This value can be positive or negative depending on orientation. It’s called the scalar triple product. This identity shows the cross product is the unique vector encoding both area and perpendicular direction.
Why This Lecture Matters
The cross product is essential for anyone who works with 3D geometry: engineers, computer graphics artists, robotics developers, physicists, and data scientists dealing with spatial data. It instantly provides a normal vector to a surface, the area spanned by two directions, and the correct orientation for rotational effects like torque and angular momentum. Without it, you would need multiple separate steps to recover perpendicular direction and area magnitude, risking sign and direction mistakes. In practice, the cross product simplifies collision detection, lighting calculations, mesh processing, drone navigation, and mechanical design.
Learning its geometric meaning prevents rote memorization and errors. By understanding that each component is a 2x2 determinant (a signed area), you can reconstruct the formula from first principles. The scalar triple product connects cross and dot products to volume, turning tricky 3D problems into simple dot-and-determinant checks. This knowledge improves debugging, as you can verify results with orthogonality and magnitude tests.
Career-wise, mastering these tools shows you can bridge algebra and geometry, a valued skill in technical roles. Many advanced topics—rigid body dynamics, computer vision geometry, and 3D optimization—build on these concepts. The cross product’s special role in 3D also highlights when you must switch to higher-dimensional generalizations (like exterior algebra), a sign of deeper mathematical maturity. In today’s industry where 3D modeling, AR/VR, drones, and autonomous systems are common, this understanding is both practical and differentiating.
Lecture Summary
Tap terms for definitions
01Overview
This lesson teaches the cross product, a special operation for 3D vectors that turns two input vectors into a new vector perpendicular to both. The direction of this new vector is set by the right-hand rule, and its length equals the area of the parallelogram formed by the two input vectors. You will learn the geometric meaning, the exact computation formula, and why this formula makes sense through determinants and linear mappings. You will also see how the cross product connects to signed area and signed volume, and why it is a unique 3D phenomenon that does not generalize to a single vector in higher dimensions.
The target audience is learners who understand basic vectors in 2D and 3D, dot products at a simple level, and the concept of area and angle. Prior knowledge of determinants helps but is not strictly required; the lesson explains 2x2 determinants as area and hints at how 3x3 determinants relate to volume. A beginner with curiosity about geometry and algebraic patterns can follow along. If you know what a vector is, what perpendicular means, and what a parallelogram is, you are ready.
After studying this, you will be able to: compute the cross product by hand, apply the right-hand rule to pick the correct direction, and explain why the magnitude equals the area of the parallelogram between the two vectors. You will also be able to use the cross product to quickly find a normal vector to a plane defined by two vectors. In addition, you will understand how determinants measure area and volume, and how the scalar triple product (a dot with a cross) equals oriented volume. This gives you both calculation skill and geometric insight.
The lecture is structured as follows. First, it defines the cross product and shows its geometric meaning: perpendicular direction and area-based length. Second, it introduces the right-hand rule to fix the direction unambiguously. Third, it presents the computational formula using components, and a helpful pattern with 2x2 determinants so you can remember and justify the formula. Fourth, it connects determinants to geometry: 2x2 determinants measure area, 3x3 determinants measure volume. Fifth, it explains a linear functional viewpoint: for any vector P, the dot of P with v×w equals the signed volume of the parallelepiped built from v, w, and P. Finally, it highlights that the cross product is special to 3D and hints at its strong role in physics, especially for rotations and quantities like torque that need both direction and area-orientation together.
Key Takeaways
✓Always anchor the direction with the right-hand rule. Curl from the first vector to the second and let the thumb guide you; reversing inputs flips the result. This prevents sign mistakes in physics and geometry. When unsure, compare against a simple basis case like x×y=z.
✓Use the component formula with the 2x2 determinant pattern. Compute each component as a difference of products following the cyclic index order. This pattern helps you rebuild the formula from memory. It also keeps your signs and index choices consistent.
✓Check perpendicularity right after computing: dot with each input should be zero. If not, recheck arithmetic and signs. This quick test catches many common errors. It turns geometry into a simple numeric check.
✓Relate magnitude to area to sanity-check answers. Compute ||v×w|| and compare to ||v||·||w||·sin(theta) if you know the angle. If you do not know the angle, at least confirm edge cases: parallel gives zero, perpendicular gives product of lengths. These tests build trust in your results.
✓Remember that order matters: v×w = −(w×v). If a later step expects a specific orientation, keep inputs in that order. This is especially important in lighting, normals, and torque direction. Consistent ordering avoids hidden flips.
✓Use cross product to get plane normals fast. Given two spanning vectors, compute n=v×w and optionally normalize it. Then write the plane as n·(p−p0)=0. This workflow is robust and repeatable.
✓Leverage the scalar triple product for volumes and orientation checks. Compute (v×w)·P to get signed volume and see if a triple is right-hand oriented. This ties three vectors together in a single number. It’s a powerful diagnostic in 3D problems.
Glossary
Cross product
An operation on two 3D vectors that produces a new vector perpendicular to both. Its length equals the area of the parallelogram formed by the two input vectors. The direction is chosen using the right-hand rule. If the inputs are parallel, the result is the zero vector. It combines area and direction in one object.
Right-hand rule
A way to pick the direction for the cross product. Curl the fingers of your right hand from the first vector toward the second. Your thumb points in the direction of the cross product. Swapping the input order flips the thumb direction. It makes orientation consistent.
Parallelogram area
The size of the flat shape formed by two vectors placed tail-to-tail. It equals base times height, where height uses the perpendicular component. For vectors v and w, the area is ||v||·||w||·sin(theta). This is exactly the length of v×w. It becomes zero if vectors are parallel.
Dot product
An operation on two vectors that returns a single number measuring alignment. It equals ||v||·||w||·cos(theta). Large positive means similar directions; negative means opposite. Zero means perpendicular.
Determinant (2x2)
Version: 1
•The cross product provides an easy way to get a normal vector to a plane containing two non-parallel vectors. That normal is perpendicular to both given vectors and sized by the plane’s spanned area. This is central in geometry, graphics, and physics. It lets us define plane equations and surface orientations.
•There is no single vector version of the cross product in 4D or higher that keeps all these properties. Area in higher dimensions depends on two directions, but there is not a unique single direction that is perpendicular to both. In 3D, a single perpendicular direction exists, making the cross product a special 3D phenomenon. This uniqueness explains why it is so widely used in 3D settings.
•The cross product’s usefulness is justified by its geometry, not just the formula. It links area and direction naturally. When you need an oriented area or a normal, cross product gives it directly. This is why it shows up in rotation-related problems in physics.
•When vectors are nearly parallel, the cross product is small and sensitive to noise. This reflects the small area between them. When vectors are orthogonal, the result is robust and large. This sensitivity is important in numerical work.
•Order matters for both determinants and cross products. Changing v and w swaps orientation and flips the sign. Determinants and right-hand rule together make a consistent system. This consistency helps avoid sign mistakes.
•Computing cross products can be checked by two quick tests: dot with v and w should be zero, and the magnitude should match the parallelogram area. These checks prevent direction and sign errors. They connect algebra back to geometry. They build intuition for correctness.
02Key Concepts
01
What the cross product is: The cross product takes two 3D vectors and outputs a third vector that is perpendicular to both. Its direction is chosen by the right-hand rule, ensuring a consistent sign. Its magnitude equals the area of the parallelogram spanned by the two input vectors. If the vectors are parallel, the result is the zero vector because the parallelogram collapses to zero area. This ties a direction (normal to the plane) together with an area (size of the span).
02
Right-hand rule for direction: To find the direction of v×w, point your right hand from v toward w by curling your fingers; your thumb shows the direction of v×w. This rule also encodes orientation: swapping v and w flips the thumb, reversing direction. It prevents ambiguity between the two opposite perpendicular directions. The rule is consistent with the sign conventions from determinants. It is essential in physics where orientation matters.
03
Magnitude equals area: The length of v×w equals the area of the parallelogram formed by v and w. In symbols, ||v×w|| = ||v||·||w||·sin(theta), where theta is the angle between v and w. This means the cross product is largest when vectors are perpendicular and zero when aligned. It links vector arithmetic to a clear geometric picture. It also provides an easy area formula when you only know vector components.
04
Contrast with the dot product: The dot product measures how much two vectors point in the same direction and equals ||v||·||w||·cos(theta). The cross product measures how much they point in different directions (perpendicular component) using sin(theta). While the dot product outputs a scalar (number), the cross product outputs a vector. Dot products flatten information to alignment; cross products lift information to a new perpendicular direction with area. Knowing both gives a full picture of angle and area relationships.
05
Normal vector to a plane: Given two non-parallel vectors in a plane, their cross product is a normal vector to that plane. A normal vector is perpendicular to every direction in the plane, which helps define the plane’s equation and orientation. This is crucial in 3D graphics, engineering, and geometry. Finding a normal by cross product is quick and robust. It encodes both direction and the “scale” of the spanned area.
06
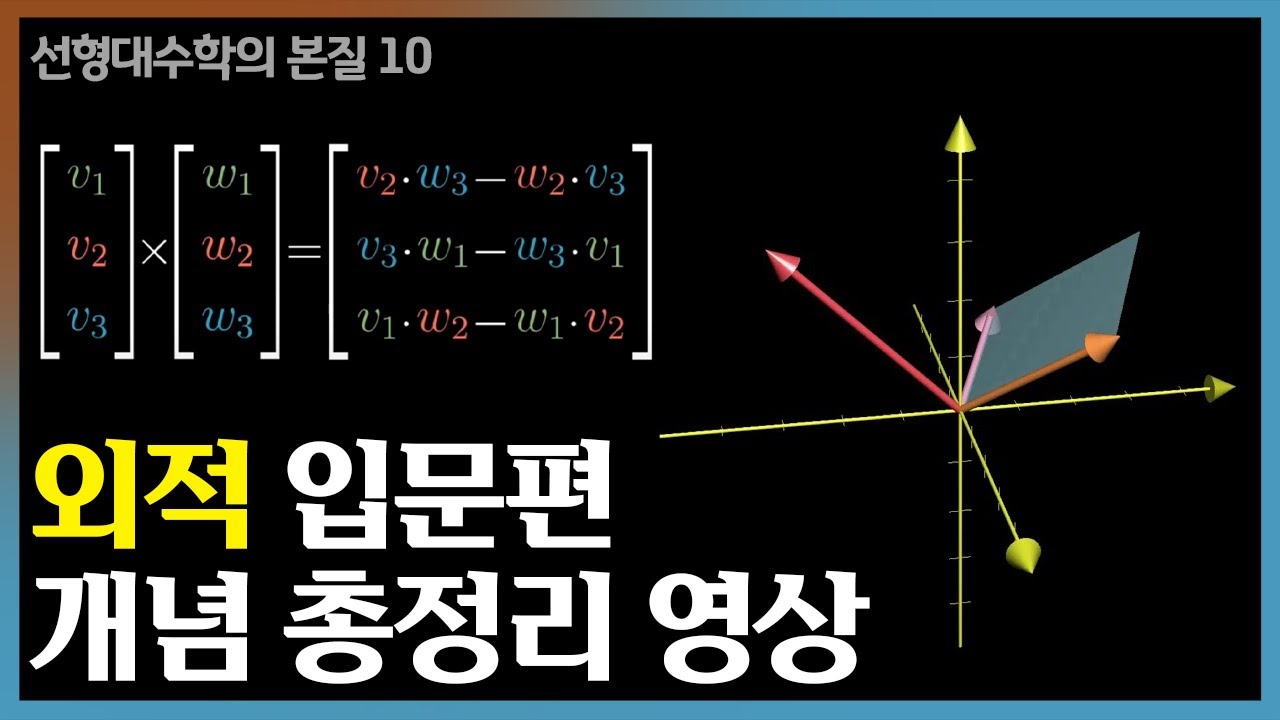
Component formula for computation: If v = (v1,v2,v3) and w = (w1,w2,w3), then v×w has components built from pairs of v and w entries. Each component is a difference of products, like v2w3 − v3w2 for the x-component. The full formula looks messy but has a consistent pattern. It can be remembered by using 2x2 determinants (minors). This computation ensures perpendicularity and the correct area-sized magnitude.
07
Determinant mnemonic with minors: You can arrange v and w in a 3x3 pattern and compute each cross product component as the determinant of a 2x2 submatrix after omitting one row and the corresponding basis unit. This minor-based trick is a stable way to recall the formula. Determinants naturally carry signed area information, which is why the results fit geometry. The pattern is not just a memory aid; it hints at why the output’s magnitude is the right area. It also mirrors cofactor expansion ideas from linear algebra.
08
2x2 determinant as signed area: For a 2x2 matrix with entries a,b,c,d, the determinant ad − bc measures how a linear transform changes areas and encodes orientation. If you use two vectors as the columns, that determinant is the signed area of the parallelogram they span. Swapping the columns flips the sign, matching orientation changes. This model explains signs in the cross product formula. It connects small algebra pieces to visual geometry.
09
Order matters and sign flips: The order of vectors in a cross product sets the orientation, so v×w = −(w×v). This mirrors how swapping columns flips the sign of a determinant. The right-hand rule is the physical guide for this choice. Keeping order straight prevents sign mistakes that change direction. This is essential for consistent results in applications.
10
A special linear map viewpoint: Imagine a linear map that sends the plane spanned by v and w to a 2D plane where v lands on the first basis and w on the second. In this setup, determinants in 2D measure areas of images of vectors. Defining a function that outputs the signed area of the parallelogram formed by the images of a test vector with one of the mapped vectors yields a linear function of the test vector. Linear functions in 3D can be written as a dot with some fixed vector. That fixed vector is exactly v×w, linking area measurement to a unique perpendicular vector.
11
Scalar triple product identity: For any vector P, (v×w$$)·P equals the signed volume of the parallelepiped formed by v, w, and P. This is also the determinant of the 3x3 matrix with columns v, w, and P. The sign is positive or negative depending on whether the ordering v, w, P follows the right-hand rule. This identity shows the cross product compactly encodes area directionality. It is a powerful check for correctness.
12
Uniqueness of the cross product vector: There is exactly one vector that is perpendicular to both v and w and whose dot with any P gives the signed volume with v and w. That vector must have length equal to the parallelogram area and point in the right-hand-rule direction. This uniqueness comes from properties of linear functions and the dot product. It explains why the cross product is not arbitrary. It is the natural companion to oriented area in 3D.
13
Zero and maximum cases: If v and w point in the same or opposite direction, the parallelogram is flat with zero area, so v×w is the zero vector. If v and w are perpendicular, the area is the product of their lengths, and the cross product is largest in magnitude. These edge cases help build intuition. They also provide quick mental checks on computations. If your result contradicts these, re-check your math.
14
Perpendicularity checks: The cross product is orthogonal to both inputs, so v⋅(v×w) = 0 and w⋅(v×w) = 0. This is an immediate numerical test after computing a cross product. If the dot is not zero (within rounding), the calculation likely has a sign or arithmetic error. This test relates algebraic orthogonality to geometric perpendicularity. It is simple and reliable.
15
3D is special; higher dimensions differ: In 4D or higher, two vectors do not determine a unique normal direction. There are infinitely many directions perpendicular to both, so one single vector cannot encode the area with a chosen orientation in the same simple way. The 3D cross product’s properties depend on 3D’s geometry. This explains why there is no perfect generalization as a single vector in higher dimensions. Specialized tools like bivectors are needed there.
16
Connection to physics and rotation: The cross product ties area with direction, which fits rotation-related quantities like torque and angular momentum. These need both direction (axis) and size (strength proportional to area or lever arm). The right-hand rule again sets the orientation of these axes. This makes the cross product a go-to tool in mechanics and electromagnetism. Understanding it removes mystery from many formulas.
17
Determinants as geometry translators: Determinants translate between algebra and geometry by turning matrix entries into signed areas and volumes. The cross product components being 2x2 determinants is not a coincidence. It ensures the output respects both area scaling and orientation. This is why the formula, though messy-looking, is geometrically correct. It is a consistent bridge between numbers and pictures.
18
Consistency with linearity: The function P ↦ (v×w$$)·P is linear in P, matching the property that determinants are linear in each column. Because every linear function in 3D can be written as a dot with a fixed vector, the cross product acts as that fixed vector. This consistency explains many algebraic identities seamlessly. It also guides proofs and computations. Geometry, algebra, and linearity all agree.
19
Practical workflow for problems: To find a perpendicular direction to two vectors, compute the cross product and then, if needed, make it a unit vector by dividing by its length. To get the area of a parallelogram spanned by two vectors, take the length of their cross product. To decide orientation, apply the right-hand rule. To check volume with a third vector, take the dot with the cross product for the scalar triple product. These steps solve many 3D geometry tasks quickly.
03Technical Details
Overall architecture of ideas
Definition and geometric meaning
Given two 3D vectors v and w, their cross productv×w is a 3D vector perpendicular to both. Its magnitude equals the area of the parallelogram formed by v and w, and its direction is set by the right-hand rule. In symbols, the magnitude is ∥v×w∥=∥v∥∥w∥sin(θ), where θ is the angle between v and w. Example: if v=300 and w=040, then θ=90∘, so ∥v×w∥=3⋅4⋅sin(90∘)=12, which matches the area of a 3 by 4 rectangle.
The direction ambiguity (two opposite normals) is resolved by the right-hand rule: curling from v to w with your right-hand fingers sets the thumb’s direction. Swapping the order flips the direction.
Component formula and how to compute
Let v=v1v2v3 and w=w1w2w3. Then
v×w=v2w3−v3w2v3w1−v1w3v1w2−v2w1. Example: if v=123 and w=456, then v×w=2⋅6−3⋅53⋅4−1⋅61⋅5−2⋅4=−36−3.
This formula looks complex, but it follows a consistent pattern: each entry is a 2x2 determinant (a minor) formed by omitting one coordinate from both vectors.
Determinants as area/volume and the mnemonic
For a 2x2 matrix (acbd), the determinant is ad−bc, which represents signed area scaling for the associated linear transform and the signed area of the parallelogram spanned by its columns. Example: columns (21) and (13) give determinant 2⋅3−1⋅1=5, so the signed area is 5 (positive orientation).
The cross product components are exactly these kinds of 2x2 determinants. Think of placing the vector components into a 3x3 pattern and taking minors to compute each component. This ties each component directly to an area measure in a 2D slice.
Linear functional and scalar triple product
Define a function of a vector P by the determinant det((vwP)), where the columns are v, w, and P. This number equals the signed volume of the parallelepipedspanned by v, w, and P. Example: if v=100, w=010, and P=234, then the determinant is 1⋅(1⋅4−0⋅3)−0+0=4, which matches the box volume built from unit square base and height 4.
This function is linear in P, so there exists a vector a=a1a2a3 such that for all P=xyz, det(v,w,P)=a1x+a2y+a3z=a⋅P. Example: let v=120 and w=013. Compute a=v×w=2⋅3−0⋅10⋅0−1⋅31⋅1−2⋅0=6−31. Then for P=xyz, det(v,w,P)=(6,−3,1)⋅(x,y,z)=6x−3y+z.
The specific vector a that makes this identity true for all P is exactly v×w. Therefore, (v×w)⋅P=det(v,w,P) for every P. Example: with v=120, w=013, and P=214, we have v×w=6−31, so (v×w)⋅P=6⋅2+(−3)⋅1+1⋅4=12−3+4=13, which equals det(v,w,P) by direct computation.
Perpendicularity and magnitude revisited
Because det(v,w,⋅) is zero whenever ⋅ lies in the plane spanned by v and w, (v×w)⋅v=0 and (v×w)⋅w=0. This makes the cross productorthogonal to both inputs. Example: let v=123 and w=456. We computed v×w=−36−3. Then v⋅(v×w)=1⋅(−3)+2⋅6+3⋅(−3)=−3+12−9=0, and w⋅(v×w)=4⋅(−3)+5⋅6+6⋅(−3)=−12+30−18=0.
The magnitude formula ∥v×w∥=∥v∥∥w∥sin(θ) agrees with the area of the parallelogram spanned by v and w. Example: v=200, w=110 gives ∥v∥=2, ∥w∥=2, and θ=45∘, so ∥v×w∥=2⋅2⋅sin(45∘)=2⋅2⋅22=2. Computing directly gives v×w=002 with length 2, matching the area.
Orientation and sign
Orientation in 3D fixes what we call the positive perpendicular direction using the right-hand rule. The sign of det(v,w,P) is positive if (v,w,P) follow the right-hand orientation and negative otherwise. This is consistent with v×w=−(w×v). Example: with v=100 and w=010, we have v×w=001, while w×v=00−1.
Using the cross product to find a plane normal
If a plane contains two non-parallel vectors v and w, then n=v×w is a normal. If a point p0=x0y0z0 lies on the plane, any point p=xyz satisfies n⋅(p−p0)=0. Example: let v=120, w=011, and p0=000. Then n=v×w=2⋅1−0⋅10⋅1−1⋅11⋅1−2⋅0=2−11. The plane equation is 2x−y+z=0.
Computation checklist
Steps: (i) Write components of v and w. (ii) Compute each component using the 2x2 determinant pattern. (iii) Apply the right-hand rule mentally to confirm the direction sign (or compare to a known basis case). (iv) Verify orthogonality by dotting with v and w. (v) Optionally check the magnitude against the area formula.
Example: with v=2−13 and w=14−2, compute v×w=(−1)(−2)−3⋅43⋅1−2⋅(−2)2⋅4−(−1)⋅1=2−123+48+1=−1079. Check v⋅(v×w)=2⋅(−10)+(−1)⋅7+3⋅9=−20−7+27=0 and w⋅(v×w)=1⋅(−10)+4⋅7+(−2)⋅9=−10+28−18=0.
Tips and warnings
Nearly parallel inputs produce a small cross product; small rounding errors can change direction noticeably. Use higher precision if needed. Always check orthogonality as a safeguard.
Keep the order consistent. If you switch v and w by accident, the result flips sign. Use the right-hand rule as a quick sanity check on direction.
Remember the zero case: if one vector is a scalar multiple of the other, v×w=000. Example: v=222, w=111 gives v×w=000 since the parallelogram flattens completely.
Why no single-vector cross product in higher dimensions
In 3D, the set of directions perpendicular to a given 2D plane is a single line (two opposite directions), so one vector suffices to encode the normal. In 4D or more, the set of directions perpendicular to two vectors forms a 2D or higher subspace, not a single line. So there is no unique single vector to represent area and orientation in the same way. More advanced objects (like bivectors) are used instead. This is why the cross product is a special gift of 3D geometry.
Putting it all together with a worked example
Suppose v=31−2 and w=−140. Compute v×w=1⋅0−(−2)⋅4(−2)(−1)−3⋅03⋅4−1⋅(−1)=8213. Check orthogonality: v⋅(v×w)=3⋅8+1⋅2+(−2)⋅13=24+2−26=0, and w⋅(v×w)=(−1)⋅8+4⋅2+0⋅13=−8+8+0=0. The magnitude gives area: ∥v×w∥=82+22+132=64+4+169=237. If ∥v∥=32+12+(−2)2=14 and ∥w∥=(−1)2+42+02=17, and if the angle between them is θ, then ∥v×w∥=∥v∥∥w∥sin(θ), so sin(θ)=1417237, which numerically matches the area relation.
04Examples
💡
Direction by right-hand rule: Let v point along the positive x-axis and w along the positive y-axis. Curl your right-hand fingers from x toward y; your thumb points along positive z. So v×w points up the z-axis. Input: v=(1,0,0), w=(0,1,0). Output: v×w=(0,0,1), confirming the rule and direction.
💡
Zero vector when parallel: Take v=(2,2,2) and w=(1,1,1), which are parallel. The parallelogram between them is completely flat with zero area. Input: v and w. Processing: compute v×w; each component cancels to 0. Output: v×w=(0,0,0), matching the area intuition.
💡
Maximum magnitude at 90 degrees: Let v=(3,0,0) and w=(0,4,0). They are perpendicular, so the area is 12. Input: v and w. Processing: compute v×w=(0,0,12). Output: magnitude 12 equals ||v||·||w||·sin(90°)=3⋅4·1=12.
💡
Component formula in practice: Use v=(1,2,3) and w=(4,5,6). Compute each component as differences of products. Input: v and w. Processing: v×w=(2⋅6−3⋅5, 3⋅4−1⋅6, 1⋅5−2⋅4)=(−3,6,−3). Output: v×w is perpendicular to both v and w.
💡
2x2 determinant as area: Consider columns (2,1) and (1,3). The determinant is 2⋅3−1⋅1=5, a signed area. Input: two 2D vectors. Processing: form a 2x2 matrix with these as columns and compute ad−bc. Output: area 5, positive because the first to second column turn is counterclockwise.
💡
Orthogonality check: Take v=(1,2,3), w=(4,5,6). After computing v×w=(−3,6,−3), dot it with v and with w. Input: v, w, and v×w. Processing: v⋅(v×w)=1⋅(−3)+2⋅6+3⋅(−3)=0 and w⋅(v×w)=4⋅(−3)+5⋅6+6⋅(−3)=0. Output: both zeros confirm perpendicularity.
💡
Scalar triple product as volume: Let v=(1,0,0), w=(0,1,0), P=(2,3,4). The determinant det(v,w,P)=4 gives the signed volume of the parallelepiped. Input: the three vectors. Processing: compute (v×w$$)·P = (0,0,1)⋅(2,3,4)=4. Output: volume 4, positive with right-hand orientation.
💡
Finding a plane normal: Suppose a plane is spanned by v=(1,2,0) and w=(0,1,1). Take n=v×w=(2,−1,1). Input: v and w. Processing: compute cross product to get n. Output: a normal vector n that can define the plane equationn⋅(p−p0)=0.
💡
Sign flip on swap: With v=(1,0,0) and w=(0,1,0), v×w=(0,0,1). Swap order: w×v=(0,0,−1). Input: same vectors reversed. Processing: recompute. Output: the result flips sign and direction, matching the right-hand rule.
💡
Area from magnitude: For v=(2,0,0) and w=(1,1,0), the cross product is (0,0,2). Input: v and w. Processing: compute ||v×w||=2. Output: area of parallelogram is 2, which equals base 2 times height 1.
💡
Nearly parallel sensitivity: Let v=(10,0,0) and w=(10,0.01,0). These are almost parallel, so the cross product is small: v×w=(0,0,0.1). Input: v and w. Processing: compute via component formula. Output: small magnitude shows area is tiny; small input changes can flip sign if angles are extremely small.
💡
Right-hand orientation test with a third vector: Let v=(0,1,0), w=(0,0,1), P=(1,0,0). Compute (v×w$$)·P. Input: v, w, P. Processing: v×w=(1,0,0), so (v×w$$)·P=1>0. Output: positive sign shows (v,w,P) follows right-hand ordering.
💡
Unit normal option: After computing n=v×w, you can normalize for a direction-only normal. Input: n=(8,2,13). Processing: divide by its length ||n||=sqrt(237). Output: unit normal (8,2,13)/sqrt(237) points the same way with length 1.
💡
Plane equation from point and normal: Given point p0=(0,0,0) and normal n=(2,−1,1), the plane equation is 2x−y+z=0. Input: n and p0. Processing: write n⋅(p−p0)=0, expand to 2x−y+z=0. Output: a simple formula to test if a point lies on the plane.
💡
Checking magnitude formula numerically: For v=(2,0,0) and w=(1,1,0): ||v||=2, ||w||=sqrt(2), theta=45°. Input: v and w. Processing: ||v×w|| should be 2·sqrt(2$$)·sin(45°)=2. Output: matches direct computation of v×w=(0,0,2).
05Conclusion
The cross product is the 3D tool that fuses area and direction into a single vector. Given two vectors v and w, v×w points perpendicular to both with direction fixed by the right-hand rule, and its magnitude equals the area of the parallelogram spanned by v and w. The component formula may seem messy, but it follows a clean pattern of 2x2 determinants, which are signed area measures. Determinants also connect the cross product to volume: for any third vector P, (v×w$$)·P equals the signed volume of the parallelepiped built from v, w, and P. This scalar triple product identity proves the cross product is the unique vector that correctly encodes both perpendicularity and oriented area.
Right after finishing, practice computing cross products for several random vector pairs, checking the results with dot products for orthogonality and with the magnitude–area formula. Try building plane equations from two spanning vectors and a point, using the cross product as the normal. Compute scalar triple products to find volumes and verify their signs by the right-hand rule. As a small project, write a routine that takes two vectors, outputs their cross product, its unit normal, and the parallelogram area; then extend it to compute signed volume with a third vector.
For next steps, study determinants and linear transformations more deeply, including how 3x3 determinants measure volume and how orientation arises from basis choices. Explore physics applications like torque and angular momentum, where the cross product’s direction and scale have direct physical meaning. If you are curious about higher dimensions, read about bivectors and exterior algebra, which generalize the idea of oriented area when no single normal vector suffices.
The core message to remember is that the cross product is not just a formula—it is a natural geometric link between area and direction in 3D. The right-hand rule resolves direction, 2x2 determinants explain the component formula, and the scalar triple product ties it all to volume. Keep these connections in mind, and the cross product will feel intuitive, reliable, and powerful in any 3D task you face.
✓Be cautious with nearly parallel vectors. The cross product magnitude becomes very small and sensitive to rounding. Use higher precision or rescale vectors if needed. Confirm direction with the right-hand rule and orthogonality checks.
✓Normalize when only direction matters. Divide by the magnitude to get a unit normal. This is standard in graphics and simulations to keep calculations stable. It prevents scaling from accidentally affecting later steps.
✓Use simple basis cases to debug. Memorize x×y=z, y×z=x, z×x=y, and the negatives for reversed order. Compare your result to these when inputs are close to basis vectors. This offers a quick sign and direction sanity check.
✓Connect algebra to pictures. Visualize the parallelogram spanned by v and w and imagine its area and perpendicular direction. Let this guide magnitudes and signs. It reduces blind computation errors.
✓Recognize 3D uniqueness: do not expect a single-vector cross product in higher dimensions. If you move to 4D tasks, look up bivectors or exterior algebra. Do not force 3D intuition where it breaks. Knowing limits saves time and confusion.
✓Build a small toolkit function: given v and w, return v×w, its unit version, and ||v×w||. Add a dot check against v and w to verify orthogonality automatically. Then extend to (v×w)·P for volumes. This re-usable code avoids repeated mistakes.
✓Use determinant intuition to remember signs. Think of each component as a 2x2 area with orientation. Swapping inputs flips that area’s sign. This mental model is easier than memorizing raw symbols.
For a 2x2 matrix with entries a,b,c,d, the determinant ad−bc measures signed area scaling. It is positive for counterclockwise orientation and negative otherwise. Using two 2D vectors as columns gives the parallelogram’s signed area. It is a basic building block for the cross product formula.
Determinant (3x3)
A number computed from a 3x3 matrix that measures signed volume scaling. Using three 3D vectors as columns gives the signed volume of the parallelepiped they span. Swapping two columns flips the sign. It underlies the scalar triple product.
Scalar triple product
The number (v×w)·P, which equals the determinant with columns v, w, P. It measures the signed volume of the parallelepiped built on these three vectors. Positive or negative depends on orientation (right-hand rule). It links cross and dot products.
Normal vector
A vector perpendicular to a surface or plane. For a plane spanned by two non-parallel vectors, their cross product is a normal. Normals help define plane equations and lighting in graphics. They also set orientation for physical laws.